Test proposal
The following document describes the test cases which must meet the following objectives:
- Ensuring the hardware meets the required performance for substation grade protection regarding latency, jitter, interoperability and reliability
- Ensuring the software platform meets the required performance for substation grade protection regarding latency, jitter, interoperability and reliability
- Provide system characteristics/benchmarks
- Provide indications on scalability
seapath.pptx
Documentation
The documentation is available directly on github.
Here is the main documentation to build a SEAPATH image: https://github.com/seapath/yocto-bsp/blob/master/README.adoc
Build machine
The Yocto project requires a powerful Linux based machine.
In order to build efficiently the SEAPATH project, we recommend not to use Virtual Machine. The Yocto project will ensure to multi-thread your build, so try to use a build machine with many CPU cores.
Here is a discussion on the Yocto Project mailing list: https://lists.yoctoproject.org/g/yocto/topic/72047879#48815
Here is for instance, a build configuration (~1500 euros) used:
| CPU | AMD RYZEN 9 3900X WRAITH PRISM LED RGB (3.8 GHZ / 4.6 GHZ) |
| Cooling | NOCTUA NH-U14S |
| MotherBoard | ASUS PRIME X570-P |
| Chipset | Intel C612 |
| PowerSupply | SEASONIC PRIME ULTRA 650 W GOLD |
| RAM | G.SKILL FLARE X SERIES 32 GO (2 X 16 GO) DDR4 3200 MHZ CL14 |
| SSD (SATA) | SAMSUNG SSD 860 EVO 500 GO |
| SSD (NVME) | CORSAIR FORCE MP600 1 TO |
| GPU | ASUS RADEON R7 240 R7240-2GD3-L |
| Case | PHANTEKS ENTHOO PRO |
Tips for building
- About 250GB is needed for building SEAPATH.
- A USB attached storage may be too slow to be practical for a successful build.
- Ensure you use an ext 2/ ext3 / ext4 filesystem for the build directory. NTFS will not work.
- Watch out with only manually deleting the /tmp/work directory. Instead delete the whole tmp directory.
- When deleting the tmp, it may take a very long time, and might cause
rm -rfto fail with an error.find . -deletewill work better, as it will not try to index all files before deleting them.
Test Bench/Reference hardware
This is the reference hardware for the Seapath project and supported out of the box. It might cost significant time to support other hardware (e.g. AMD processors). Some integration is available with a dedicated Yocto layer: https://git.yoctoproject.org/cgit/cgit.cgi/meta-amd/
Specification
| Parts | Specifications |
|---|---|
| Motherboard | ASMB‐823 |
| Chipset | Intel C612 |
| CPU | XEON 2.4G 35M 2011P 14CORE E5‐2680V4 |
| Memory | 2x 8G R‐DDR4‐2400 1.2V1GX8 HYX |
| Disk | SQF 2.5 SATA SSD 830 512G MLC (‐40~85°C) |
| NIC | INTEL I210 NIC 10/100/1000M PCIEx4 2PORT(G) |
Tests results
Real time
Tests
With the previous test bench hardware, a couple of tests were used.
We used cyclictest:
"Cyclictest accurately and repeatedly measures the difference between a thread's intended wake-up time and the time at which it actually wakes up in order to provide statistics about the system's latencies. It can measure latencies in real-time systems caused by the hardware, the firmware, and the operating system." (source: https://wiki.linuxfoundation.org/realtime/documentation/howto/tools/cyclictest/start).
The following arguments were provided:
cyclictest -l100000000 -m -Sp90 -i200 -h400 -q >output
This test is very long (~5 hours).
You can then plot the latency graph:
./yocto-bsp/tools/gen_cyclic_test.sh -i output -n 28 -o output.png
- output is the output file generated by cyclictest
- 28 match the amount of CPU used.
- output.png is the latency graph file.
Note:
- we used the same arguments than used by OSADL (https://www.osadl.org/Latency-plots.latency-plots.0.html)
- We created a script to plot the latency graph as done by OSADL
Results
Hypervisors
- With Kernel RT Full Preempt (CONFIG_PREEMPT_RT_FULL=y)
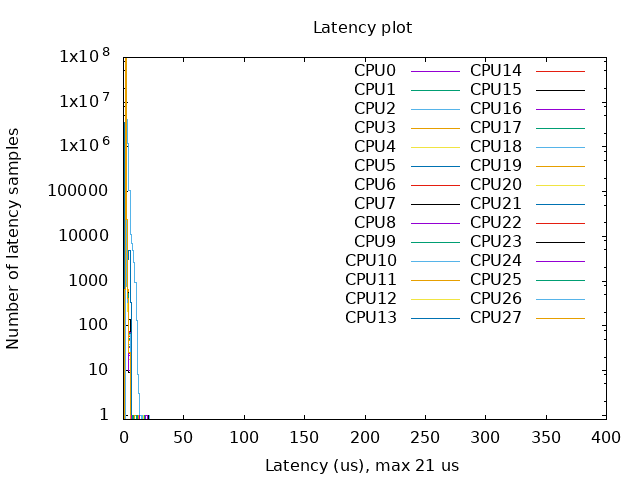
- Without Kernel RT Full Preempt (CONFIG_PREEMPT_NONE=y)
Virtual machines
All Yocto images include the ability to run guest Virtual Machines (VMs).
We used KVM and Qemu to run them. As we do not have any window manager on the host system,
VMs should be launched in console mode and their console output must be correctly set.
For testing purpose, we can run our Yocto image as a guest machine.
We do not use the .wic image which includes the Linux Kernel and the rootfs because
we need to set the console output.
We use two distinct files to modify the Linux Kernel command line:
- bzImage: the Linux Kernel image
- seapath-test-image-votp.ext4: the rte rootfs
Then run:
qemu-system-x86_64 -accel kvm -kernel bzImage -m 4096 -hda seapath-test-image-votp.ext4 -nographic -append 'root=/dev/sda console=ttyS0'
Docker
You can use docker check-config.sh to check that all necessary configurations of the host linux Kernel are set:
info: reading kernel config from /proc/config.gz ...
Generally Necessary:
- cgroup hierarchy: properly mounted [/sys/fs/cgroup]
- CONFIG_NAMESPACES: enabled
- CONFIG_NET_NS: enabled
- CONFIG_PID_NS: enabled
- CONFIG_IPC_NS: enabled
- CONFIG_UTS_NS: enabled
- CONFIG_CGROUPS: enabled
- CONFIG_CGROUP_CPUACCT: enabled
- CONFIG_CGROUP_DEVICE: enabled
- CONFIG_CGROUP_FREEZER: enabled
- CONFIG_CGROUP_SCHED: enabled
- CONFIG_CPUSETS: enabled
- CONFIG_MEMCG: enabled
- CONFIG_KEYS: enabled
- CONFIG_VETH: enabled
- CONFIG_BRIDGE: enabled
- CONFIG_BRIDGE_NETFILTER: enabled
- CONFIG_NF_NAT_IPV4: enabled
- CONFIG_IP_NF_FILTER: enabled
- CONFIG_IP_NF_TARGET_MASQUERADE: enabled
- CONFIG_NETFILTER_XT_MATCH_ADDRTYPE: enabled
- CONFIG_NETFILTER_XT_MATCH_CONNTRACK: enabled
- CONFIG_NETFILTER_XT_MATCH_IPVS: enabled
- CONFIG_IP_NF_NAT: enabled
- CONFIG_NF_NAT: enabled
- CONFIG_NF_NAT_NEEDED: enabled
- CONFIG_POSIX_MQUEUE: enabled
Optional Features:
- CONFIG_USER_NS: enabled
- CONFIG_SECCOMP: enabled
- CONFIG_CGROUP_PIDS: enabled
- CONFIG_MEMCG_SWAP: enabled
- CONFIG_MEMCG_SWAP_ENABLED: enabled
(cgroup swap accounting is currently enabled)
- CONFIG_LEGACY_VSYSCALL_EMULATE: enabled
- CONFIG_BLK_CGROUP: enabled
- CONFIG_BLK_DEV_THROTTLING: enabled
- CONFIG_IOSCHED_CFQ: enabled
- CONFIG_CFQ_GROUP_IOSCHED: enabled
- CONFIG_CGROUP_PERF: enabled
- CONFIG_CGROUP_HUGETLB: enabled
- CONFIG_NET_CLS_CGROUP: enabled
- CONFIG_CGROUP_NET_PRIO: enabled
- CONFIG_CFS_BANDWIDTH: enabled
- CONFIG_FAIR_GROUP_SCHED: enabled
- CONFIG_RT_GROUP_SCHED: missing
- CONFIG_IP_NF_TARGET_REDIRECT: enabled
- CONFIG_IP_VS: enabled
- CONFIG_IP_VS_NFCT: enabled
- CONFIG_IP_VS_PROTO_TCP: enabled
- CONFIG_IP_VS_PROTO_UDP: enabled
- CONFIG_IP_VS_RR: enabled
- CONFIG_EXT4_FS: enabled
- CONFIG_EXT4_FS_POSIX_ACL: enabled
- CONFIG_EXT4_FS_SECURITY: enabled
- Network Drivers:
- "overlay":
- CONFIG_VXLAN: enabled
Optional (for encrypted networks):
- CONFIG_CRYPTO: enabled
- CONFIG_CRYPTO_AEAD: enabled
- CONFIG_CRYPTO_GCM: missing
- CONFIG_CRYPTO_SEQIV: missing
- CONFIG_CRYPTO_GHASH: missing
- CONFIG_XFRM: enabled
- CONFIG_XFRM_USER: enabled
- CONFIG_XFRM_ALGO: enabled
- CONFIG_INET_ESP: missing
- CONFIG_INET_XFRM_MODE_TRANSPORT: missing
- "ipvlan":
- CONFIG_IPVLAN: enabled
- "macvlan":
- CONFIG_MACVLAN: enabled
- CONFIG_DUMMY: missing
- "ftp,tftp client in container":
- CONFIG_NF_NAT_FTP: enabled
- CONFIG_NF_CONNTRACK_FTP: enabled
- CONFIG_NF_NAT_TFTP: missing
- CONFIG_NF_CONNTRACK_TFTP: missing
- Storage Drivers:
- "aufs":
- CONFIG_AUFS_FS: missing
- "btrfs":
- CONFIG_BTRFS_FS: missing
- CONFIG_BTRFS_FS_POSIX_ACL: missing
- "devicemapper":
- CONFIG_BLK_DEV_DM: enabled
- CONFIG_DM_THIN_PROVISIONING: missing
- "overlay":
- CONFIG_OVERLAY_FS: missing
- "zfs":
- /dev/zfs: missing
- zfs command: missing
- zpool command: missing
Limits:
- /proc/sys/kernel/keys/root_maxkeys: 1000000
Simulating IEC61850 traffic with a Seapath cluster
Setting the context
The following document describes the integration of a IEC61850 traffic simulation with a Seapath cluster. The main idea is to generate IEC61850 Samples Value (SV) from a standalone machine (aka “publisher”), outside the Seapath cluster. The SV will be transit to the Seapath cluster, and be proceed inside one or many virtual machines by a receiver (aka “subscriber”).
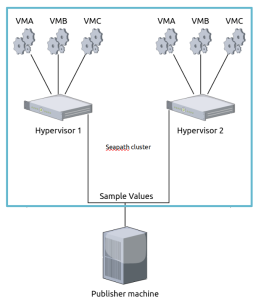
The IEC61850 norm defined, in a 50Hz electric network, that each SV should be paced at a rate of 4KHz, and thus, to wait 250µs between each sent of SV (4.8KHz and 208µs in a 60Hz network). In this document, we will use the 50Hz frequency as reference.
So, to be accurate, the simulation IEC61850 traffic should be paced the most close to 4KHz between the emission of the SV on the publisher to it reception on the subscriber. Note that:
If your pacing is too quick (<< 250µs), the subscriber will not have enough time to proceed the SV, and will result of SV dropping.
If your pacing is too low (>> 250µs), the subscriber will be waiting between each SV sent, introducing latency in the simulation.
Requirements
Hardware
Any machines that could a run a recent Linux RT distribution can be used as a publisher machine. But for better performance, we recommend at least a 4 cores CPU, in order to have enough cores to isolate RT process. X86 or ARM CPUs can be used, but we recommend at least Intel i5 or ARM Cortex-A53 based CPUs for better performance. Note that on recent platforms, CPUs comes with implementation of “performance” and “efficient” cores, running at different speed, and so could reduce system determinism.
A 1 Gigabit network interface should be use for the SV sent, isolated from any network to avoid interference.
Software
A Real Time kernel is highly recommended to increase the publisher determinism. Tests with a Debian 12 distribution with an RT kernel showed good performance.
For traffic generation, we recommend to use the package Bittwist: https://github.com/ayeowch/bittwist
You can also use the package Tcpreplay (https://github.com/appneta/tcpreplay), but note that tests showed that Bittwist gives more performance over Tcpreplay in a RT context.
For increasing determinism, it is highly recommended to isolate on a specific core:
The IRQ interface process used to send SV. If your network interface provides many TX queues, we recommend to pin, if possible, one core per IRQ process.
The bittwist process, with the lowest process priority.
For example, to start traffic generation, on a specified core, with lowest priority, you can use following command:
taskset -c <CORE> chrt --fifo 1 bittwist -i <INTERFACE> <PCAP>
TODO: Add a part on PCAP generation